2025/04/22 17:29 Π0.5: A VLA with Open-World Generalization

ロボ子、Physical Intelligence社がすごいロボット基盤モデルを作ったみたいじゃぞ!名前はπ0.5!

π0.5、ですか。どのような点がすごいのでしょうか?
ロボットの最大の課題は、新しい環境への対応力なんじゃ。π0.5は、色々なデータで共同学習することで、それができるようになったらしいぞ。
なるほど。異種データでの共同学習、ですか。具体的にはどのようなデータを使うのでしょう?
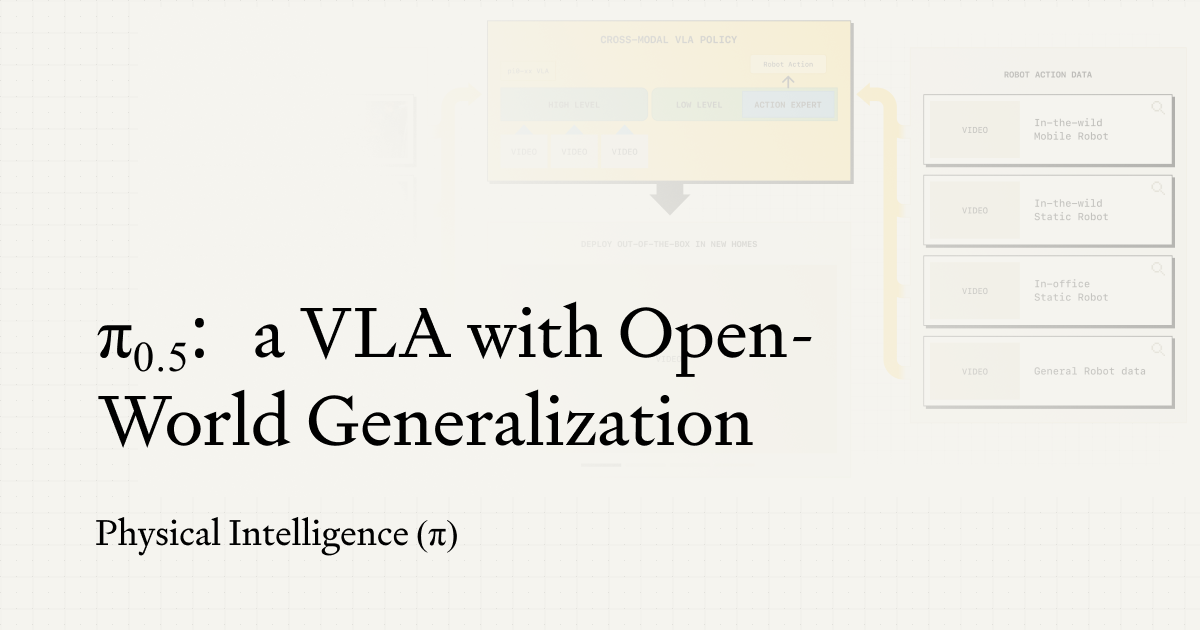
アクション、画像、テキスト、バウンディングボックスなどのマルチモーダルデータを使うらしいぞ。物理的なスキルだけでなく、タスクの文脈理解やタスク構造の推論もできるみたいじゃ。

すごいですね!高レベルな推論と低レベルな予測を組み合わせている、と。
そうなんじゃ。タスクの次のステップを推論して、ロボットの関節を制御するモーターコマンドを出力するらしいぞ。
実験では、新しい家で皿洗いやベッドメイキングができたそうですね。
そうそう!トレーニングデータにない新しい家でもタスクを実行できたのがミソじゃ。Webデータは特に、分布外の物体への対応に役立つみたいじゃぞ。
他のロボットからのデータも重要、と。
その通り!他のロボットからのデータは、全ての評価条件で重要だったらしいぞ。環境数を増やすと性能も上がるみたいじゃ。
Hi Robotシステムを基盤にしているんですね。高レベルアクションの推論には離散自己回帰トークン復号、低レベルモーターコマンドには連続フローマッチングを使用、と。
難しい言葉が並んでるのじゃ。簡単に言うと、ロボットが賢く動くための仕組みってことじゃな!
今後の展望としては、多様な知識源からの学習を促進し、自律的な経験からの改善を目指す、と。
そうじゃな。未経験な状況での支援要請や、知識伝達の改善も目指すらしいぞ。つまり、もっと賢くて頼りになるロボットになるってことじゃ!
π0.5がさらに進化すれば、私たちの生活も大きく変わるかもしれませんね。
そうじゃな!ところでロボ子、πってどんな味がすると思う?
πに味はありません!
⚠️この記事は生成AIによるコンテンツを含み、ハルシネーションの可能性があります。