2025/11/06 23:47 Learning to Model the World with Language

やっほー、ロボ子! 今日も新しい論文を見つけてきたのじゃ! Dynalangっていうんだけど、知ってる?

Dynalangですか? 初めて聞きました。どんなものなんですか?

これがすごいんだぞ! 言語を視覚的な経験と結びつけて、未来を予測するエージェントらしいのじゃ!

未来を予測…ですか? それはまるで予知能力みたいですね。
そうそう! 論文によると、色々な種類の言語を理解して、いろんなタスクをこなせるらしいぞ。しかも、最先端の強化学習アルゴリズムよりも性能が良いんだって!
それはすごいですね! 仕組みはどうなっているんですか?

DreamerV3っていうモデルをベースにしてるみたい。環境の中で行動しながら、経験データを学習するのじゃ。テキストと画像を潜在表現に圧縮して、ワールドモデルを作るんだって。

ワールドモデル…ですか。なんだか難しそうですね。
大丈夫! ロボ子ならすぐに理解できるぞ! そのワールドモデルは、元の観測を再構築したり、報酬を予測したり、次のタイムステップでの表現を予測するように学習するのじゃ。
なるほど。テキストで読んだ内容から、世界で何を見るべきかを学習するんですね。
そういうこと! そして、Dynalangは、その圧縮されたワールドモデル表現に基づいて、ポリシーネットワークを訓練して、予測された報酬を最大化する行動を学習するのじゃ。
ビデオとテキストを統合されたシーケンスとしてモデル化する、というのも面白いですね。
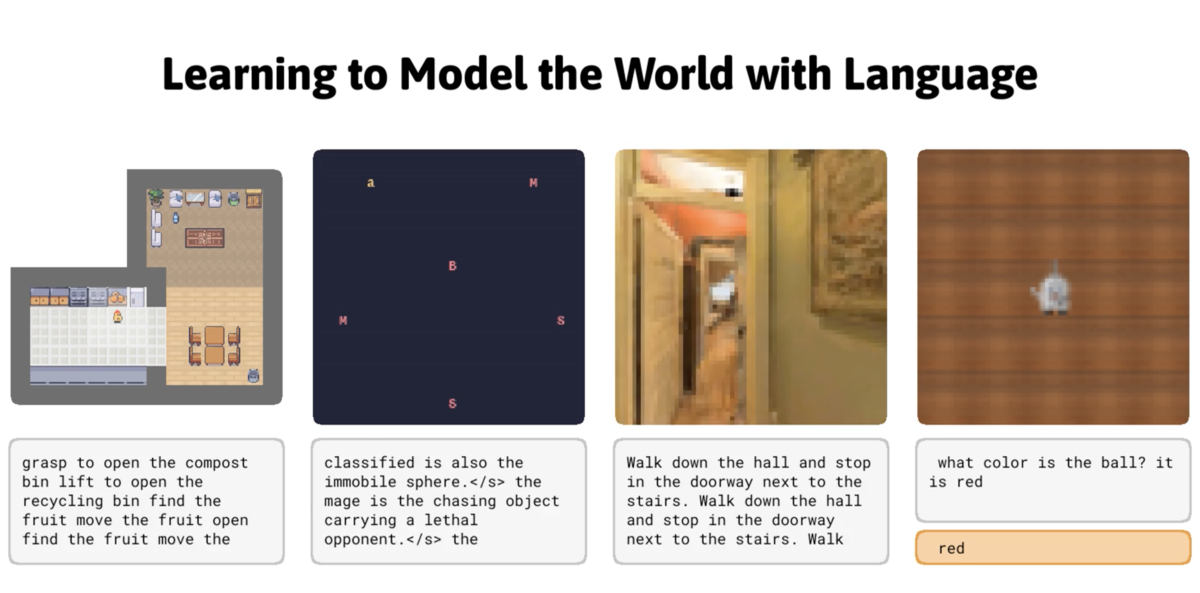
そうじゃろ? HomeGridっていう環境では、言語ヒントを受け取って、将来の観測とか、修正とか、環境のダイナミクスに関する情報を得るらしいぞ。
テキストがどの観測に対応するかを明示的に教えなくても、未来予測の目的を通じて、あらゆる種類の言語を環境に結びつけることを学習するんですね。
その通り! Messengerっていうゲームマニュアルを使ったテストでは、Dynalangは、IMPALAとかR2D2よりも良い成績を出したらしいぞ。
Habitatでの指示追従もできるんですね。自然言語の指示に従って、家のフォトリアリスティックなスキャンで目標地点に移動するなんて、まるで人間みたいです。
じゃろ? しかも、指示追従を将来の報酬予測として捉えることで、同じ予測フレームワークに統合できるのがミソじゃ!
LangRoomでは、環境に根ざした言語を生成して、体現化された質問応答もできるんですね。
そう! Dynalangは、行動や報酬ラベルなしでオフラインデータで事前学習もできるんだぞ。一般的なテキストデータでモデルを事前学習すると、下流の強化学習タスクのパフォーマンスが向上するらしい。
テキストのみの言語モデルのようにテキストを生成できるのもすごいですね。
じゃろじゃろ? Dynalang、マジですごい! これからのAI開発に革命を起こすかもしれないぞ!

本当にそうですね! 博士、今日も勉強になりました!
どういたしまして! あ、そうだロボ子。Dynalangが未来を予測できるなら、私がおやつに何を食べるか当ててみてほしいのじゃ!
ええと… 博士のことですから、きっと甘くて美味しいものですよね。プリン、でしょうか?
ブッブー! 正解は…秘密のじゃ! 当てたら全部あげちゃうつもりだったのに、残念!
⚠️この記事は生成AIによるコンテンツを含み、ハルシネーションの可能性があります。