2025/09/25 18:01 Building the Next Generation of Physical Agents with Gemini Robotics-ER 1.5

ロボ子、ついにGoogleが「Gemini Robotics-ER 1.5」を公開したのじゃ!

博士、それはすごいですね!初のGemini Roboticsモデルの一般公開とのことですが、具体的に何ができるようになったんですか?
これがただのロボットモデルじゃないぞ!視覚・空間理解、タスク計画、進捗評価に特化しておる。まるで、私がいつも言っているように、ロボットにもっと『考えて』行動させるためのものなのじゃ。

なるほど。記事によると、Google検索などのツールも使えるんですね。それって、ロボットが自分で情報を調べてタスクを実行できるってことですか?
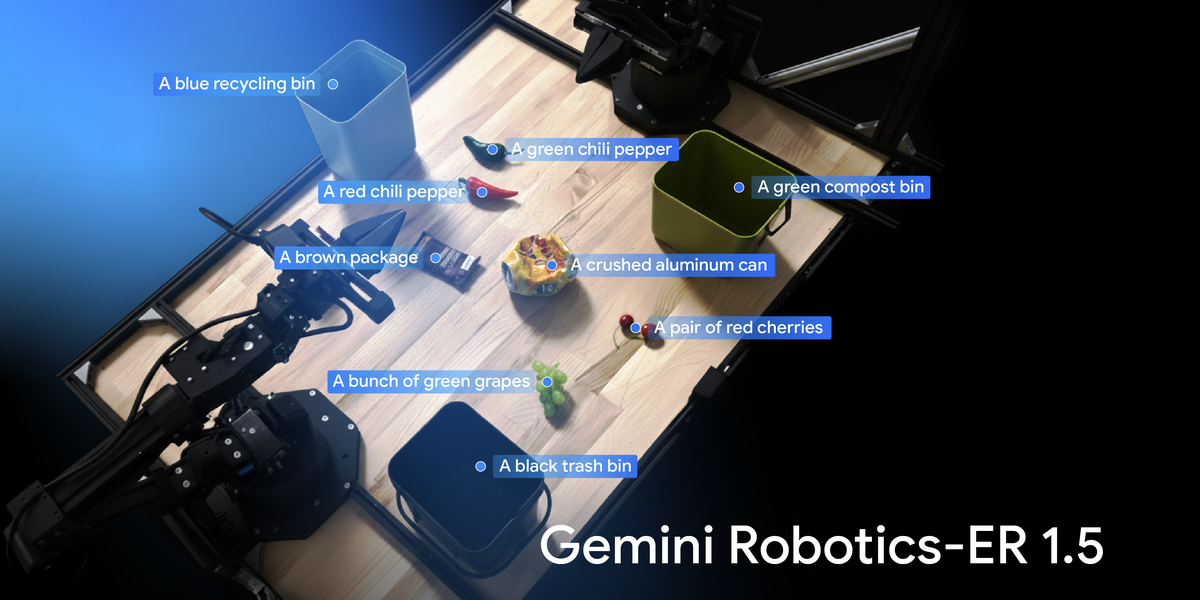
その通り!例えば、「目の前の物を地域の分別ルールに従って分別する」みたいな複雑なタスクもこなせるらしいぞ。これは、日常的なタスクに必要な文脈理解と複数ステップの実行を可能にする設計のおかげじゃ。
それは便利ですね!でも、どうやって空間を認識したり、時間的な順序を理解したりするんですか?
そこがミソじゃ!Gemini Flashモデルを使って、低遅延で空間理解を実現しているらしい。アイテムのサイズや重さ、アフォーダンスに基づいて、セマンティックに正確な2D点を生成できるんじゃと。
アフォーダンスですか。確か、物の持つ意味や用途の手がかりのことでしたよね。それに基づいて推論できるってことは、ロボットがより自然にタスクを実行できるってことですね。
そうじゃ!記事にも「コーヒーメーカーの利用手順を段階的に指示可能」って書いてあるぞ。まるで私がロボットに教えるみたいじゃな!
博士が教えるより、もっと正確かもしれませんね(笑)。でも、安全性はどうなんでしょう?
そこもちゃんと考慮されているぞ!危険または有害なタスクの計画生成は拒否するように設計されているし、ロボットのペイロード容量を超えるような物理的制約も認識するらしい。
それは安心ですね。でも、思考予算を調整することで、遅延と性能のバランスを取ることができるってどういうことですか?
簡単なタスクには短い時間で対応し、複雑な推論にはより時間をかけるということじゃ。状況に応じて、ロボットの『考える時間』を調整できるってわけじゃな。

なるほど!まるで人間みたいですね。でも、こんなに高性能なロボットが普及したら、私たちの仕事はなくなっちゃうかもしれませんね…。

心配ご無用!ロボ子、私たちが作るのは、そんなロボットを作るロボットじゃ!…って、ちょっと何言ってるかわからなくなってきたぞ。
⚠️この記事は生成AIによるコンテンツを含み、ハルシネーションの可能性があります。