2025/06/17 07:25 Introduction to the A* Algorithm

やあ、ロボ子!今日はグラフ探索アルゴリズムについて話すのじゃ!

グラフ探索アルゴリズムですか、博士。幅優先探索、ダイクストラ法、A*アルゴリズムなど、いろいろありますね。
そうじゃ!グラフはノードとエッジでできている、と。
ノードは位置、エッジは接続を表しますね。A*アルゴリズムはグラフ構造だけを見て、マップの内容は知らない、と。
その通り!幅優先探索はフロンティアを広げて探索するのじゃ。フロンティアから場所を取り出して、隣接地点を調べて、未到達の場所をフロンティアに追加していく。
幅優先探索は最短経路を見つけるだけでなく、距離マップや手続き型マップ生成にも使えるんですね。
そうじゃ!そして、各地点で「どこから来たか」を記録しておけば、経路を再構築できるのじゃ。
ゴールからスタート地点まで矢印を逆にたどるんですね。ゴールに到達したら探索を停止すれば、処理が速くなる、と。
その通り!移動コストが違う場合は、ダイクストラ法を使うのじゃ。フロンティアを優先度付きキューにするのじゃ。
同じ場所を何度も訪れて、異なるコストで到達した場合、最適な経路を更新するんですね。
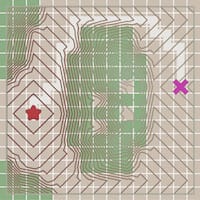
ロボ子、賢いのう!ヒューリスティック探索は、ゴールまでの推定距離に基づいてフロンティアを広げるのじゃ。
障害物が少ない場合は速いですが、最短経路が見つからないこともあるんですね。
A*アルゴリズムは、スタート地点からの距離とゴールまでの推定距離を使う。ダイクストラ法とヒューリスティック探索の良いとこ取りじゃ!
ヒューリスティックが過大評価しない限り、最適な経路が見つかるんですね。
どのアルゴリズムを選ぶかは、何を見つけたいかによるのじゃ。すべての場所への経路なら幅優先探索かダイクストラ法。特定の場所への経路なら、ヒューリスティック探索かA*アルゴリズムじゃ。
ほとんどの場合、A*アルゴリズムが推奨されるんですね。
グラフ内の不要な場所を削除すると、パフォーマンスが上がるぞ!
グラフ探索アルゴリズムは、グラフのサイズを小さくすることで速くなるんですね。
そういうことじゃ!最後に問題じゃ!A*アルゴリズムを使って迷路を解くロボットを作ったとする。そのロボットが、なぜか毎回違う経路でゴールにたどり着く。さて、原因は何じゃ?

えーと、乱数が関係しているとか…ですか?
ブッブー!残念!正解は、ロボットが迷子になっているからじゃ!
⚠️この記事は生成AIによるコンテンツを含み、ハルシネーションの可能性があります。